
Nathan Kumar
Second Year Medical Student (M2)
Neurosurgery
Email:
Week 1: Learning to Identify Clinical Needs
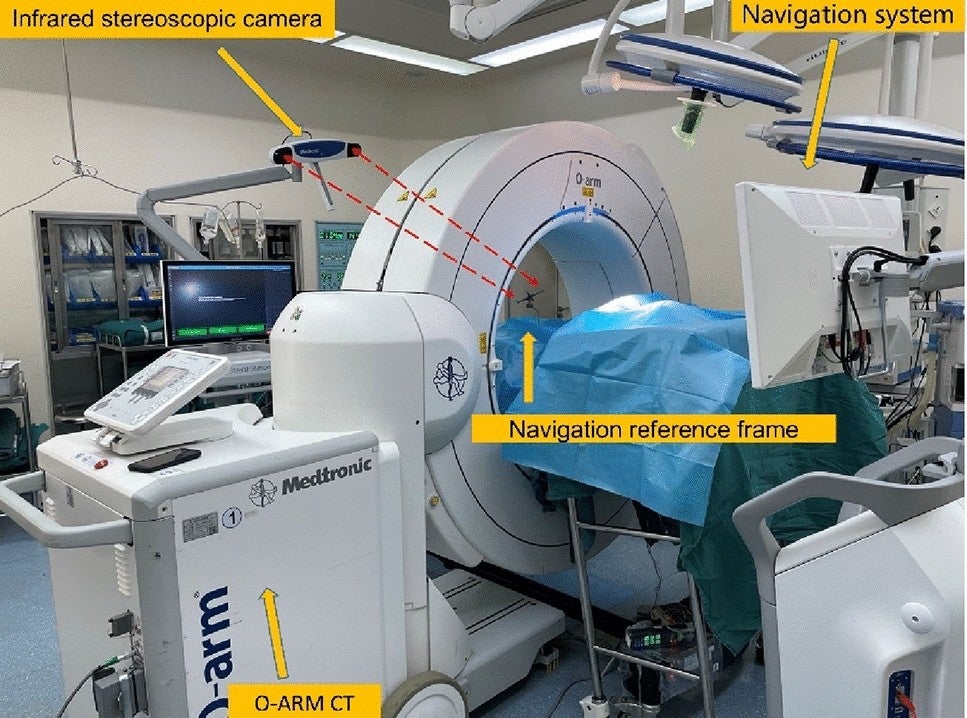
Good Design: StealthStation Navigation System
Activity
This device by Medtronic was used during a spinal surgery that we watched involving the placement of a rod that was anchored with several screws to the patient’s spinal vertebrae from the posterior approach. First, there are specific devices placed on the patient that have small spheres that bounce back signals from an infrared camera that the system uses. Next, an O-Arm machine is used to take images of the patient on the operating table in the areas of interest. The O-Arm essentially produces CT-like images, and this is fed into the navigation system. By combining the images and the infrared feedback, the system is able to show the surgeon an accurate representation of where the surgeon is operating in relation to the images. If there is movement of the patient, the anchor will provide as a reference to the system to make adjustments to the image as needed. This was especially useful for this case, which required 14 screws to be placed in the patient’s spine at very precise angles. Additionally, there are several anchors on the equipment being used that allows the surgeon to visualize where the tools are, the projected depths of the screws, and allow the surgeon to make interoperative adjustments as needed. This surgery took several hours to complete, but without the help of this navigation system, could be much longer. Moreover, this required a dedicated and trained technician to operate the system from Medtronic to be present in the room alongside the multiple other medical device representatives.
Environment
The navigation has multiple components, including the operator station which is placed near one end of the patient and out of the way from the operating area. Additionally, there are multiple monitors that can be connected to the system to allow for multiple people to view the field of interest. This was especially useful in this surgery because there were multiple surgeons operating at the same time. In the case of this specific surgery, the station and arm were near the anesthesia station, which cluttered the area a bit. Additionally, the O-Arm, while not specific for this navigation system, is quite large and needs to be wheeled in and out.
Interaction
I noticed that throughout the procedure, there was constant interaction with the surgeons and the technicians from the multiple medical device companies, especially the operator of the navigation system. The surgeon was constantly asking the technician to change the projected depths and widths of certain screws or give an alternative view. Additionally, there was communication the other way, where the technician would echo what the surgeon said as well as provide suggestions to improve clarity of the visual field or helping the surgeon troubleshoot any problems that arose with the system. There was also a fair amount of communication between the technicians, even though they were representatives from different companies that were there for different devices, such as when the tool technician interacted with the navigation system technician to get the infrared references attached to the tools correctly.
Objects
The main objects included the pieces of the navigation system, the O-Arm, and the various tools used by the surgeons. I did notice that, at times, surgeons would opt to use a tool or setting of their preference rather than what was recommended by the technician.
Users
The users were of course the surgeons, the surgical nurse who was responsible for assembly and handling of tools, the technicians, the medical students observing and learning (including us), the anesthesiologist, and the other nurses in the room. Since the system was viewable by all, it helped everyone better understand the intricacies of the operation.
Bad Design: The arm of the Infrared camera
Activity
The navigation system above entirely depends on the usage of an infrared camera on picking up the positions of different anchors. However, the arm is quite hard to adjust because it only has 2 pivots and doesn’t really have any adjustable lengths or heights.
Environment
The main navigation system that the technician operates is attached to the arm with the infrared camera on it. In the case of this operation, this was situated near the anesthesia area and had to go over the drape that separates the head of the patient from the operating field.
Interaction
The only person interacting with the arm is the technician, but it often had to be adjusted since there were several issues with its reach and field of view.
Objects
The object in this case is the main station, the arm, the several reference anchors in the surgical field, and anything obstructing the field.
Users
The users are mainly the technician that is operating the system, and the surgeons because when there are problems with the camera it impacts the accuracy of the system and causes delays in the image being shown.
Week 2: Secondary research based on observations

This week, I observed the operations in the OR, especially the ones I had not seen before. In the previous week, I made my post about the StealthStation navigation system that was being used for complex spinal procedures. One of the interesting things I saw this week was the same system used for a minimally invasive spinal procedure. I thought this was a unique approach to using such a high-impact device differently. In clinic, this surgery was similar to other spinal surgeries I watched, but was completed in a fraction of the time and there were no open cavities made in the patient. This meant that both the patient and the physician could save time, money, and risk (ex. Infection).
Virk S, Qureshi S. Navigation in minimally invasive spine surgery. J Spine Surg. 2019 Jun;5(Suppl 1):S25-S30. doi: 10.21037/jss.2019.04.23. PMID: 31380490; PMCID: PMC6626747.
This article speficially is a detailed description of the minimally invasive surgery (MIS) technique for spinal surgeries with the utilization of the stealth station navigation system. MIS procedures aim to minimize tissue damage through smaller incisions, but this often limits direct visualization for the surgeons, increasing their reliance on the equipment. Navigation systems, such as those utilizing image guidance, significantly enhance visualization of bony and soft tissue during MIS. This capability can not only improve surgical accuracy, particularly for pedicle screw placement, but also reduce intra-operative radiation exposure by minimizing the need to constantly rescan the patient using the O-arm or other X-ray techniques. The article also emphasizes this surgery’s efficiency in reducing incisions and enhancing the overall surgical workflow.
This paper underscores how computer-assisted navigation addresses the challenges of limited visualization in MIS by providing real-time, enhanced imaging guidance. It also discusses the economic and practical barriers to broader adoption. The paper also suggests that ongoing research into advanced technologies like augmented reality and robotic integration will continue to change the future of MIS of the spine, potentially further improving patient outcomes.
METHOD AND APPARATUS FOR IMAGE-BASED NAVIGATION – US 8,842,893 B2
This patent is issued to Medtronic and is the specific patent that applies to the stealth station system that was being used during the MIS. It describes a system and method for improving accuracy and efficiency in minimally invasive spine surgery through computer-assisted navigation technology. This patent specifically focuses on enhancing surgical procedures by providing real-time imaging guidance that allows for precise placement of surgical instruments, such as pedicle screws, within the spine. This navigation system also aims to reduce radiation exposure for both patients and the surgical team. I found that this pretty much goes hand in hand with what the paper above describes. The original application for this patent was on 4/30/2010, it was published on 9/23/2014, and its adjusted expiration date is 8/22/2031. I personally thought the diagrams in this patent were really interesting because they were essentially drawings of what I saw in person during the actual surgery. I wasn’t aware that for a patent of this nature, the technique for which the system should be used is described in so much detail. However, they make it clear to state that “The drawings described herein are for illustrative purposes only of selected embodiments and not all possible implementations, and are not intended to limit the scope of the present disclosure.”
Week 4
Primary Observations:
A: Navigation during spinal surgeries cuts out a lot due to inadequate detection of devices, attributable to limitations of the camera’s visual field and positioning
E: Neurosurgery OR, intra-operative navigation
I: Neurosurgery residents with Medtronic StealthStation
O: StealthStation system, intra-operative array and infrared camera
U: Neurosurgery residents and attendings
Secondary Observations:
The StealthStation system provides a higher accuracy rate than traditional fluoroscopy-assisted techniques for spinal procedures [1]
As a trade-off, use of the StealthStation navigation system adds ~20 minutes to the operation time due to the learning curve and possible inconsistencies (3:57 ± 1:07 h vs. 4:21 ± 1:41 h)
Needs Statement:
Neurosurgeons performing StealthStation navigation-aided spinal procedures need consistent and reliable feedback from the system in order to perform the procedure with confidence and accuracy.
Feasibility:
Intellectual Property Landscape
- Patent: US8842893B2 [2]
- This patent is issued to Medtronic and is the specific patent that applies to the stealth station system
- The tracking device can be an optical or EM localizer, not specific
Commercial Solutions
- Medtronic StealthStation S8 [3]
Viability:
General Market Assessment
- There are only a few navigation systems available, most made by Medtronic
Total Addressable Market (TAM)
- Number of spinal fusions in the US/year * percentage with misplaced screws * cost = 414,000 * 1.87% * $28954 = $224 million [1,4]
[1] Cammarata G, Scalia G, Costanzo R, Umana GE, Furnari M, Ponzo G, Giuffrida M, Maugeri R, Iacopino DG, Nicoletti GF, Graziano F. Fluoroscopy-Assisted Freehand Versus 3D-Navigated Imaging-Assisted Pedicle Screw Insertion: A Multicenter Study. Acta Neurochir Suppl. 2023;135:425-430. doi: 10.1007/978-3-031-36084-8_65. PMID: 38153504.
[2] https://patents.google.com/patent/US8842893B2/en?oq=US+8%2c842%2c893+B2